

ISM3D
El ISM3D es un sistema de referencia de posición y rumbo submarino de gran precisión.
El ISM3D utiliza acelerómetros basados en MEMS de alta calidad, giroscopios de tasa angular y magnetómetros, todos los cuales se alimentan en un motor de fusión avanzado impulsado por un microprocesador de doble núcleo.
{kind=link}
-
- ± 1° Exactitud del rumbo
- ± 0,07 ° Precisión de cabeceo y rolido
- Software para ver, registrar y configurar
- Profundidad nominal a 6.000 metros
- Carcaza robusta y compacta
- Actualizaciones de firmware en campo
- Bajo consumo de energía
- Emular cualquier dispositivo
- Interfaces digitales
La unidad proporciona un rumbo de ± 1° de norte magnético local con cabeceo y rolido a una precisión de ± 0.07 °. Provisto en una carcasa de titanio con una profundidad de 6.000 metros y una longitud de 65 mm, el ISM3D establece un nuevo estándar en tamaño, durabilidad y capacidad.
También disponible en una profundidad de Delrin Housing de 1,000 metros o como un sistema OEM.
ISM3D ROV y AUV AHRS MRU
Rumbo a ± 1° de norte magnético local.
El cabeceo se deriva de la tecnología basada en el sistema micro-eléctrico-mecánico (MEMS). Dentro del ISM3D hay giroscopios, acelerómetros y magnetómetros basados en MEMS. Las salidas de cada uno de estos dispositivos MEMS se fusionan utilizando un algoritmo de fusión avanzado. El resultado de esto es el encabezado, el tono y el rollo altamente estables.
La lectura del cabeceo y rolido se deriva de la tecnología basada en el sistema micro-eléctrico-mecánico (MEMS).
Dentro del ISM3D hay tres giroscopios, acelerómetros y magnetómetros basados en MEMS. Las salidas de cada uno de estos dispositivos MEMS se fusionan entre sí, proporcionando un rumbo, tono y rollo altamente estables.
Usos:
ROV y AUV
Proporciona rumbo a ± 1° de norte magnético local con cabeceo y rolido a una precisión de ± 0.07 °. La alta velocidad de actualización (hasta 250Hz) es altamente aplicable para el uso con rumbo automático y sistemas de estabilización de vehículos. Para un rendimiento óptimo, se puede realizar una calibración en la unidad una vez instalada en el ROV o AUV. Esto asegura que siempre se proporciona un rumbo consistente y preciso.
En áreas donde hay una gran cantidad de acero de otros perturbadores magnéticos, la unidad puede configurarse para operar usando los giroscopios y acelerómetros de velocidad angular, sin la entrada del magnetómetro.
La baja velocidad de deriva de los avanzados giroscopios basados en MEMS permite que la navegación se realice en áreas donde previamente solo bastaría un sensor de rumbo basado en diodos láser de fibra o anillo.
Monitorización de equipos
Hacia ± 1° de norte magnético local con cabeceo y rolido a ± 0.07 ° de precisión. Proporciona una comprensión clara de la orientación y la actitud del equipo.
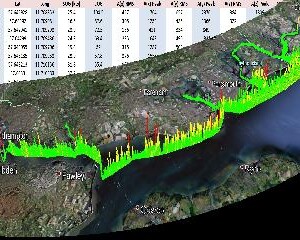
Batimetrías
Rumbo ± 1° de norte magnético local con cabeceo y rolido a ± 0.07 ° de precisión. Ideal para trabajos de levantamiento hidrográfico.
Referencia de movimiento
Rumbo ± 1° de norte magnético local con cabeceo y rolido a ± 0.07 ° de precisión. Ideal para monitorear el movimiento de cualquier vehículo, plataforma o estructura subacuática.
Marca
Impact Subsea

seaView SOFTWARE
Batimetrías, altimetría y multihaz, Sensores de movimiento, Software
DaccR
Sensores de movimiento
SST (Sea Surface Temperature)
Sensores de movimiento, Sensores OEM, Transmisión de datos y posicionamiento